This page presents an experience of non-collision inside a fleet of Autonomous Surface Vehicles (ASV). Robust Positive Invariant ellipsoids are used as stable neighborhoods around the equilibrium point to guarantee non-collision under bounded disturbances.
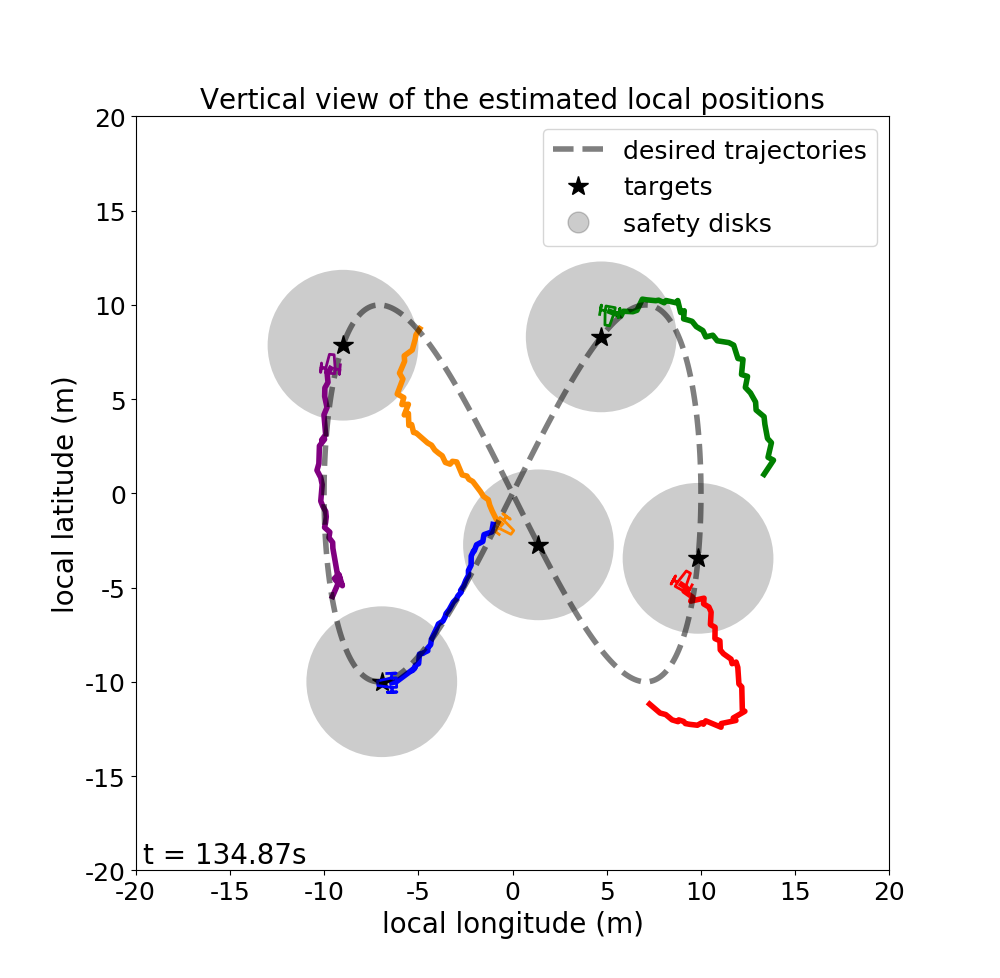
In this experiment, 5 vehicles of type DDBOAT from the ENSTA Bretagne are programmed to track moving GNSS waypoint targets. The vehicle’s controller is designed to be asymptotically stable without disturbances. The equilibrium point of the system is reached when the boats are on their tracked waypoint. Assuming bounded disturbances, a robust positive invariant ellipsoid is found around this equilibrium point. If the vehicles are initialized in the ellipsoid, then they will stay inside. There is a maximum distance between every robot and its target. This distance then defines safety disks centered on the targets (see Figure 2) where the robots will be. Finally, the trajectories of the targets are planned to verify no safety disk overlapping to guarantee the non-collision.
The experiment took place on the 21 and 22 of June 2022, at the 6ème journée des Démonstrateurs en Automatique (21 & 22 June 2022), on the Lac de Maine in Angers (France).

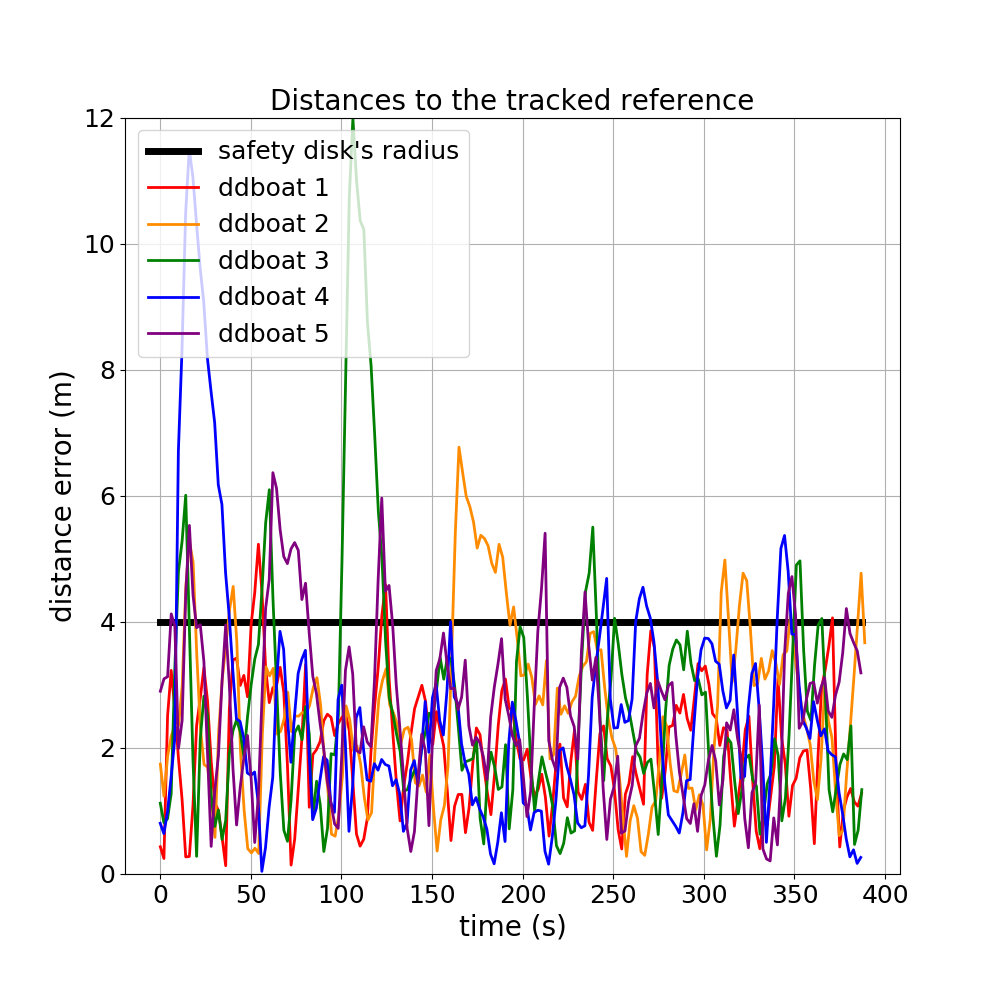
However, with realistic disturbances, the radius of the safety disk was too big (100m) for the available experimental water area. This was mainly due to the presence of wind and the bad precision of the robot’s sensors (GNSS and compass). To have feasible trajectories, the disturbances were underestimated. As a result, as Figure 3 shows, the robots can temporarily escape their safety disk which creates a risk of collision. Nevertheless, they are most of the time in the disk and no collision happened during the experiment.
To conclude, while the non-collisions were guaranteed under bounded disturbances, the safety disks are too big and pessimistic in practice. However, they can be used the reduce the risk of collision.